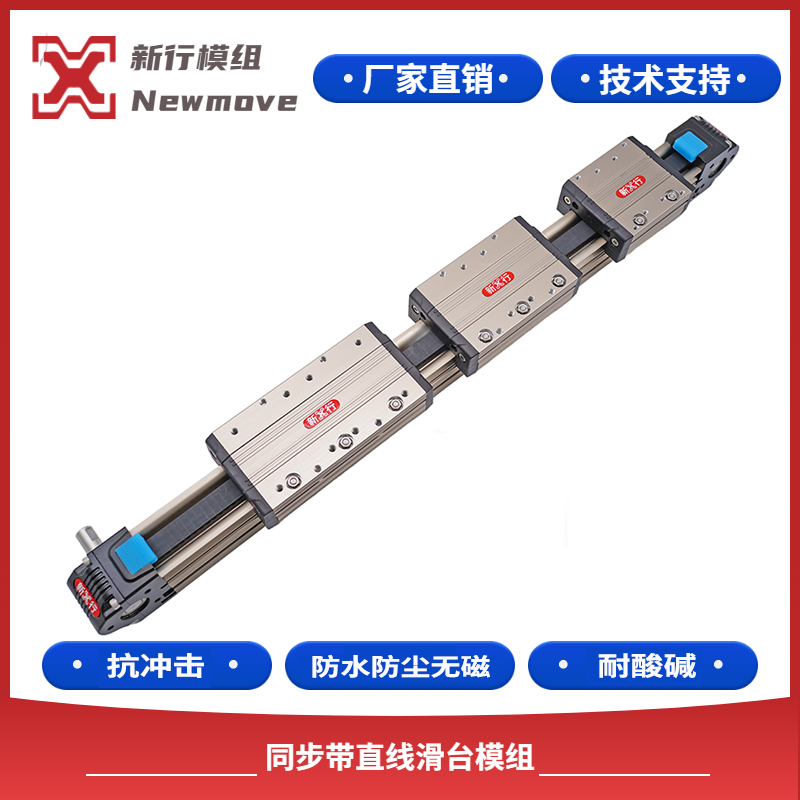
笛卡尔机器人、桁架式机器人机械手也叫做直角坐标机器人,是一种常见的工业机器人。工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度间成空间直角关系、多用途的操作机。由直线模组搭建的系统能够搬运物体、操作工具,以完成各种作业。
桁架机器人机械手是一种建立在直角X,Y,Z 三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其控制核心通过工业控制器(如:PLC,运动控制,单片机等)实现。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出相关的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的直线模组全自动作业流程。
常见应用是计算机数控机床,而且直线滑台模组可以有多种用途,例如作为铣床或绘图机。许多数控机床加工企业为了提高数控加工的生产效率及生产安全,已经开始采用直线滑台模组设备进行上下料机加工自动化生产。使用自动化生产设备能凸显企业生产实力,提高市场的竞争力,是工业生产加工的热门趋势。
选择搭建直线模组结构,请记住以下三点,以确保您获得适合您应用的直线模组结构。
1.方向
方向通常由应用程序决定,关键因素是需要从上方还是从下方处理零件或是否需要进行处理。确保系统不干扰其他固定或运动部件并且不造成安全隐患也很重要。直线模组具有许多不同的XY和XYZ配置,可以满足应用和空间限制。在标准的多轴方向内,还可以选择将执行器直立或侧面安装。这种设计选择通常要考虑到刚度,因为某些执行器(尤其是具有双导轨的执行器)在侧面安装时具有更高的刚度。
2.负载,行程和速度
这三个应用参数是选择大多数直线模组的基础。应用程序需要在给定时间内将一定的负载移动特定的距离。但是它们也是相互依存的。随着负载的增加,最大速度最终将开始下降。如果悬臂是最外部的,则行程受负载限制;如果滚珠丝杠驱动,则受速度限制。
3.精确度
线性执行器是笛卡尔机器人精度和准确性的基础。执行器的类型(是否具有铝制或钢制底座,以及驱动机构是皮带,螺杆,直线电动机还是气动装置)是精度和可重复性的主要决定因素。但是,如何将执行器安装和固定在一起也会影响机器人的行进精度。在组装过程中精确对准并固定的直线模组系统通常比未固定的系统具有更高的行进精度,并且在其整个生命周期中能够更好地保持这种精度。在任何直线模组多轴系统中,轴之间的连接都不是完全刚性的,并且许多变量会影响每个轴的行为。这使得行进精度和重复性很难进行数学计算或建模。为了确保直线模组系统满足要求的行程精度和可重复性的,建议寻找经过制造商测试的,具有相似负载,行程和速度的系统。